Lego Spike Prime. Robots bípedos. Próximamente.
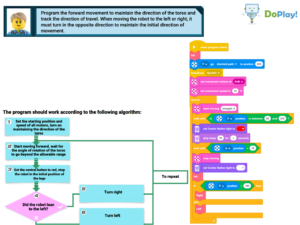
Montaje y programación de robots bípedos. Análisis de sistemas de funcionamiento y puntos de equilibrio. Variaciones lógicas de programaciones.
-
Descripción
-
Currículum
-
Reseñas
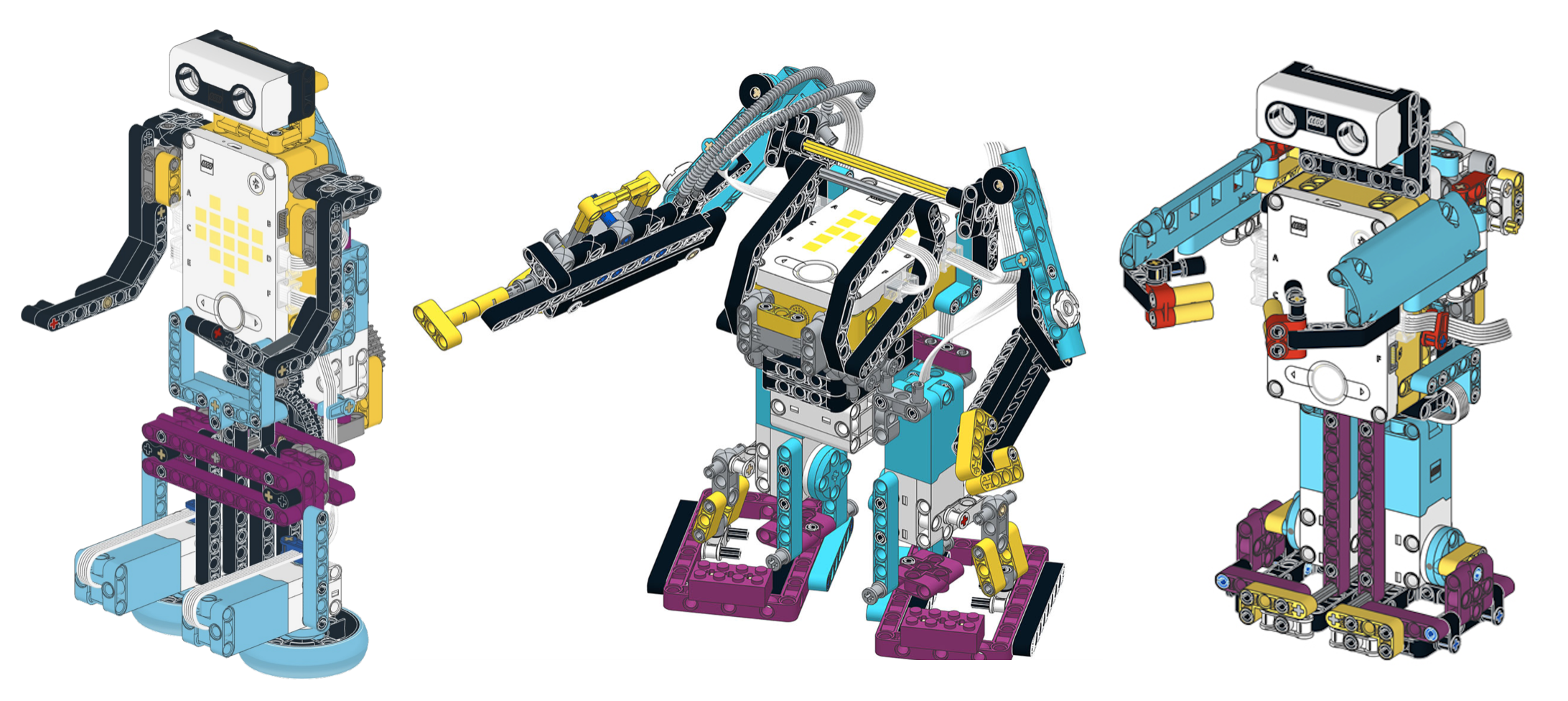
Montaje y programación de robots bípedos.Todo robot tiene tres tipos de componentes. Sistema de control (placa controladora), sensores capaces de interpretar información del mundo o del propio robot y actuadores que producen un efecto sobre el mundo o sobre el propio robot (motores).
-
- Estudiamos los grados de libertad de cada robot.
- Sistemas de movimiento y mecanismo implicados.
- Programaciones implícitas para correcto funcionamiento
- Equilibrios necesarios, centros de gravedad, inercias.
Modificaciones. Proponemos mejoras estructurales, mecánicas, dinámicas y de programación con objeto de mejorar eficiencia de movimientos.
Un buen robot bípedo debe ser capaz de modificar la posición de sus elementos mecánicos, para desplazar dinámicamente su centro de gravedad. De hecho, esta capacidad será el ingrediente más importante a la hora de conseguir que nuestro robot se mantenga de pie. Un robot en una posición estática se mantendrá estable si la proyección de su centro de gravedad sobre la superficie horizontal se encuentra dentro del área acotada por los puntos de apoyo del robot. En resumen, para que un robot llegue a caminar, es necesario que sea capaz de apoyar su peso en un pie o en otro, en diferentes instantes de tiempo.