Description
OLINPIADA 1
1. MISIOA: ABIADURA-LASTERKARIA diseinatzea. Engranajeen
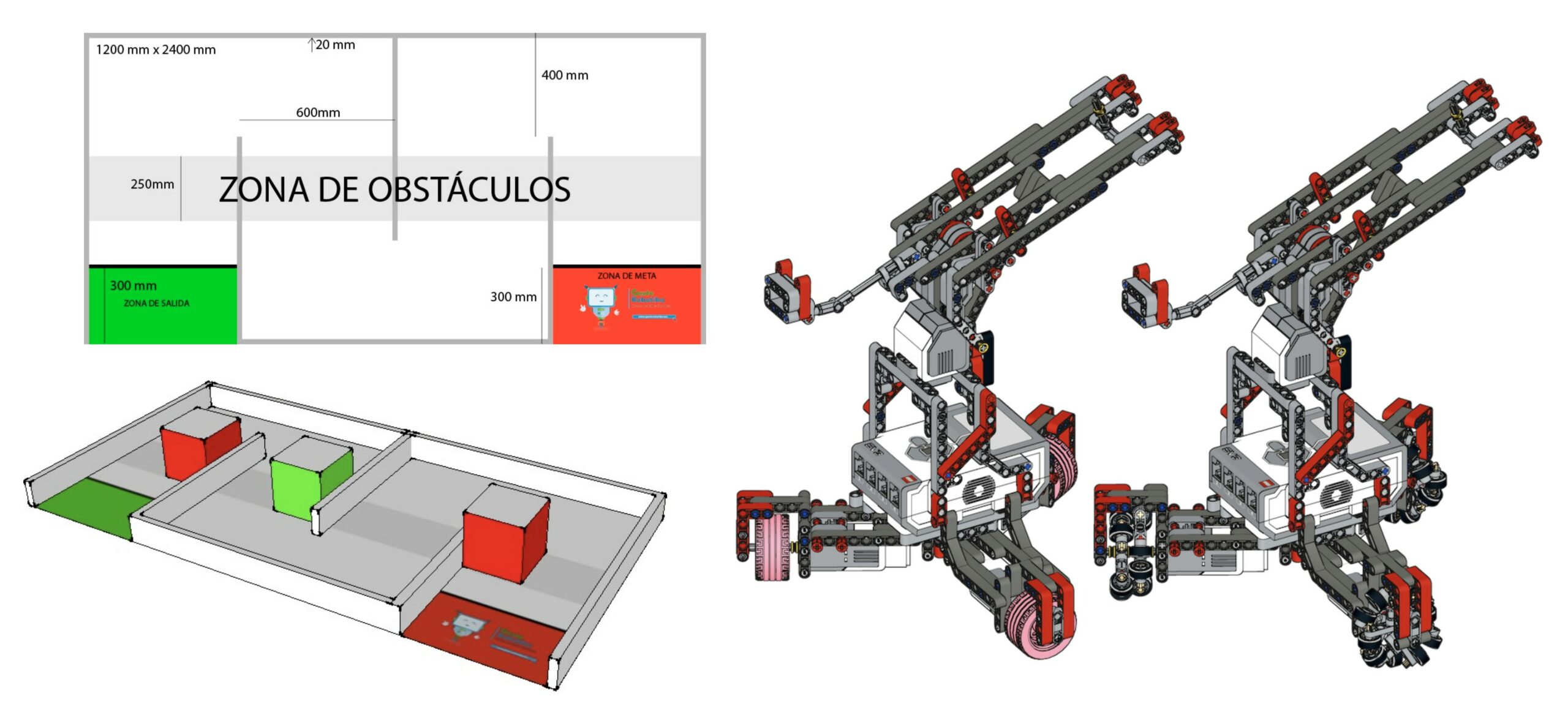
2. MISIOA: OZTOPOAK detektatzea eta saihestea.
3. MISIOA: MUGIMENDUEN zehaztasuna Programazio Aurreratuarekin.
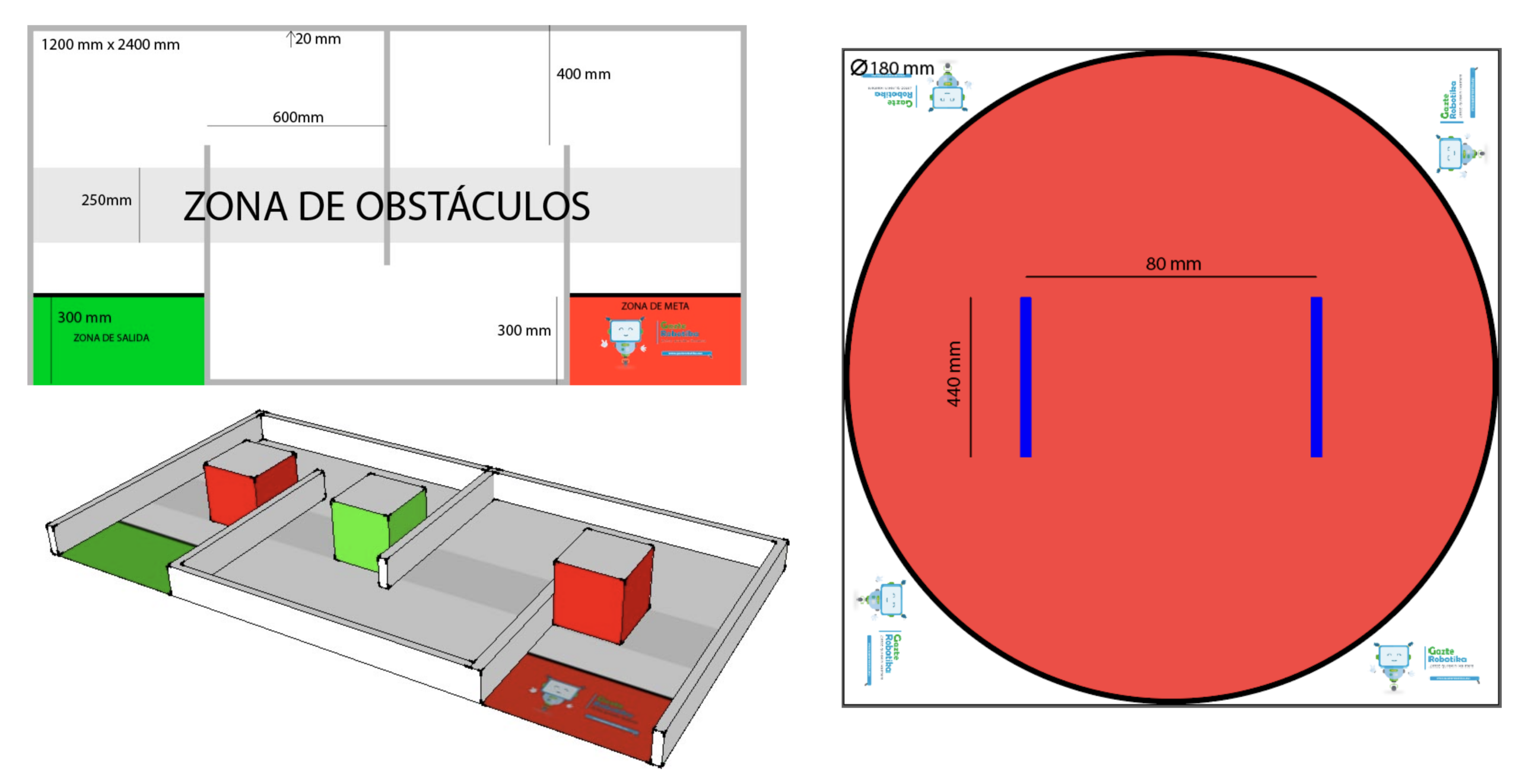
4. MISIOA: SUMO robota eraikitzea. Oinarrizko kontzeptuak.
5. MISIOA: BORROKA estrategiak. Diseinua eta programazioa.
-
Azkar mugitzen denb makina edo ibilgailu baten diseinua eta eraikuntza. Engranajeen erlazioa. Atsedenetik abiatuta, ezinbestekoa da abiatzeko indarren analisia egin eta behar besteko azelerazioa lortzea.
-
Oztopo lasterketan, lehen gakoa zuzen mugitzea da. Horretarako, ezinbestekoa da aurrera egiteko diseinu egokia egin eta ultrasoinuak erabiliz oztopoak detektatzea, programazio bidez.
-
Oztopo lasterketan, bigarren gakoa 90 graduko bira zehatzak egitea da. Giroskopio- sentsorearekin, programazio egokia eta etengabeko baliozkotzeak erabiliz, abiaduraren kaltetan
-
SUMO erronka. Nolakoak dira borrokalari japoniarrak? Ibilgailu bat diseinatu beharko dugu, bultza egiten duena, saihesteko gai dena, suntsiezina, arina, astuna… Dena ezin da izan. Gure estrategia zehaztu behar dugu.
-
Robota urrutiko agintearekin maneiatzea funtsezkoa da. Hainbat modu daude urrutiko agintea eta infragorrien baliza sentsorea programatzeko. Alternatiba aukeratu eta hobekuntzak egitea.
2.OLINPIADA
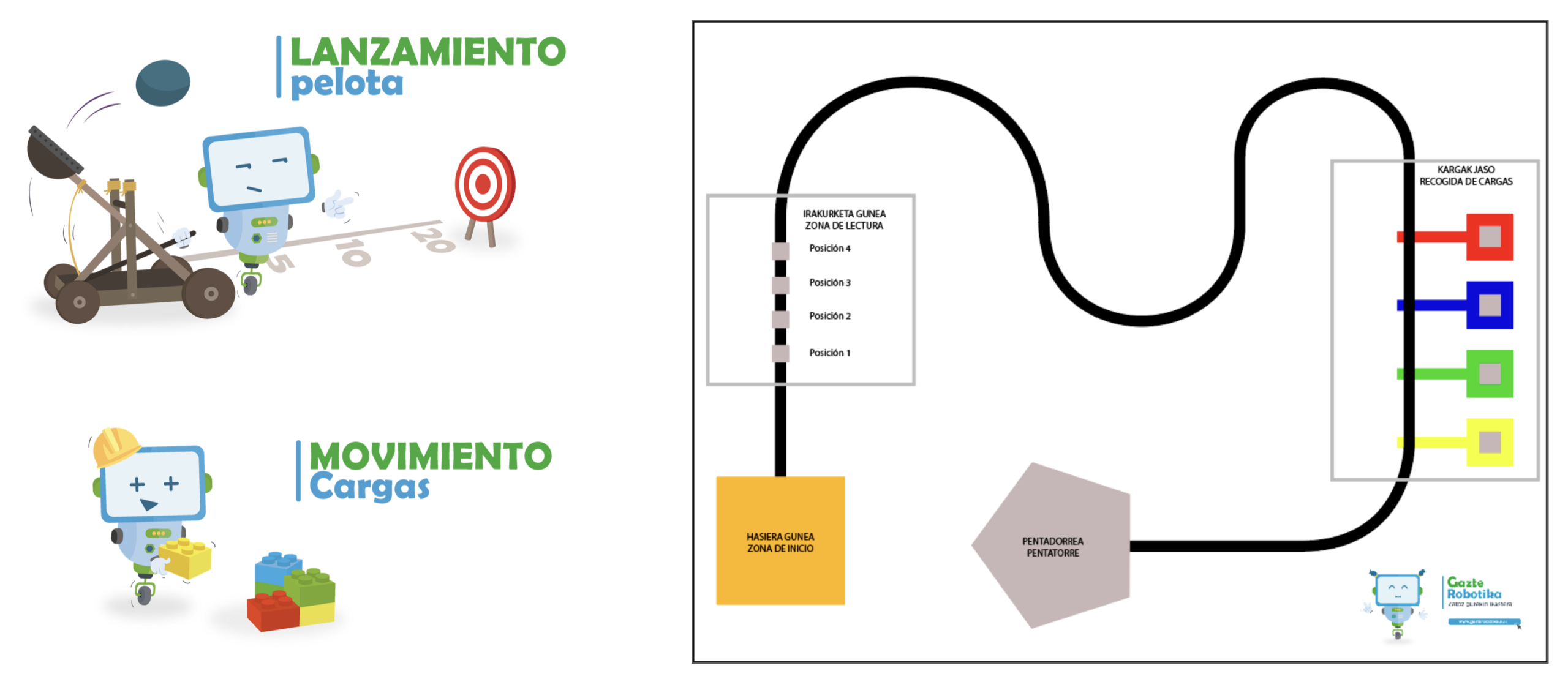
1. MISIOA: KATAPULTA diseinatzea. Irismena eta zehaztasuna.
2. MISIOA: KATAPULTA eraikitzea. Etengabeko hobekuntza prozesua.
3. MISIOA: ROBOT KARGATZAILEA diseinatzea. Erronka ulertzea.
4. MISIOA: Robota eraikitzea. ZAMAK MANIPULATZEA.
5. MISIOA: helburua betetzeko PROGRAMAZIO AURRERATUA.
-
Katapulta-makina eraikitzea, irismen maximoarekin. Nola lortu bultzada edo talka? Energia metatzeko edo transferitzeko, eta behar denean, beste mota batean eraldatzeko aukera ematen duten mekanismoak aztertuko ditugu.
-
Bigarren urrats gisa zehaztasuna landuko dugu. Katapultaren irismena erraz mugatzeko gai izan behar gara, funtsean irismen maximoari eragin gabe. Euskarrien eta lokailuen egonkortasuna eta fidagarritasuna.
-
4 lauki grisetan agertzen diren koloreek, pentagonoan dorrea zein ordenatan pilatu behar dugun adierazten digute. Jaso behar dugun bloke bakoitza pentadorrea jarri aurreko eremuan kokatuta egongo da.
-
Kolorezko blokea biltegiratzeko, jaso eta hainbat altueratan jartzeko aukera emango duen orga bat diseinatzea eta eraikitzea. Makinen zinematikaren etengabeko hobekuntza eta ingeniaritza prozesua.
-
Aldizkako balioztatzeen bidez Informazio fidagarria ematen duten sentsoreak programatzea, misioa arrakastaz garatzeko aukera emango digu honek. Begiztak, interakzioak eta motorren kontrola
Tailerra anitzagoa eta dinamikoagoa izan dadin, jardunaldi bakoitzean beste produktu eta plataforma batzuetara sarrera labur bat egingo dugu; Robotika, Halocode, errealitate areagotua eta errealitate birtualeko betaurrekoak, Ozobot, CyberPi, droneak, Micro:bit elektronika, MakeCode Arcade, KNEX Education, Vex, Fischertechnik, Tinkercad, Blender, Roblox edo Minecraft bezalakoak.












