Descripción
OLIMPIADA 1
MISIÓN 1: Diseño de VELOCISTA. Relación de Engranajes
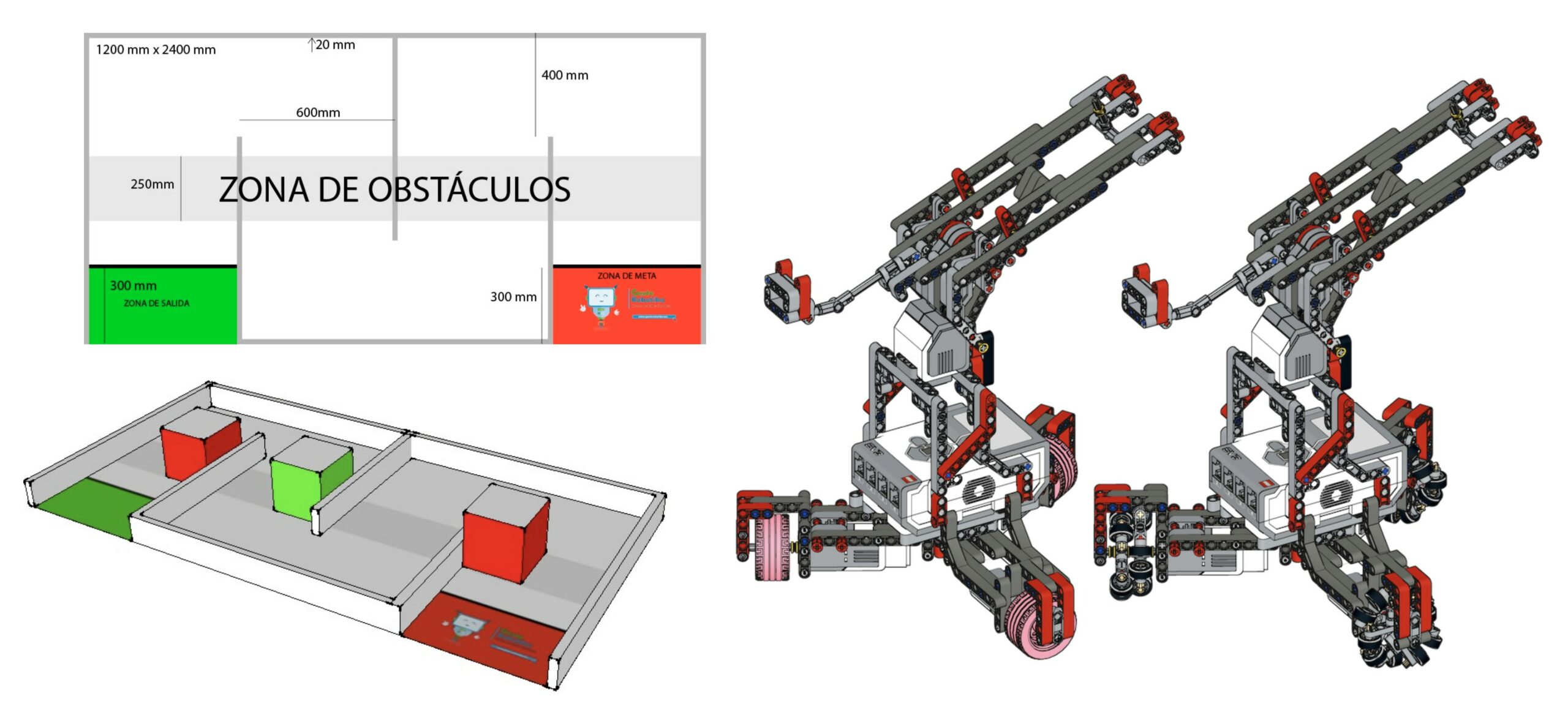
MISIÓN 2: Detección de OBSTÁCULOS y evitarlos.
MISIÓN 3: Precisión MOVIMIENTOS con Programación Avanzada
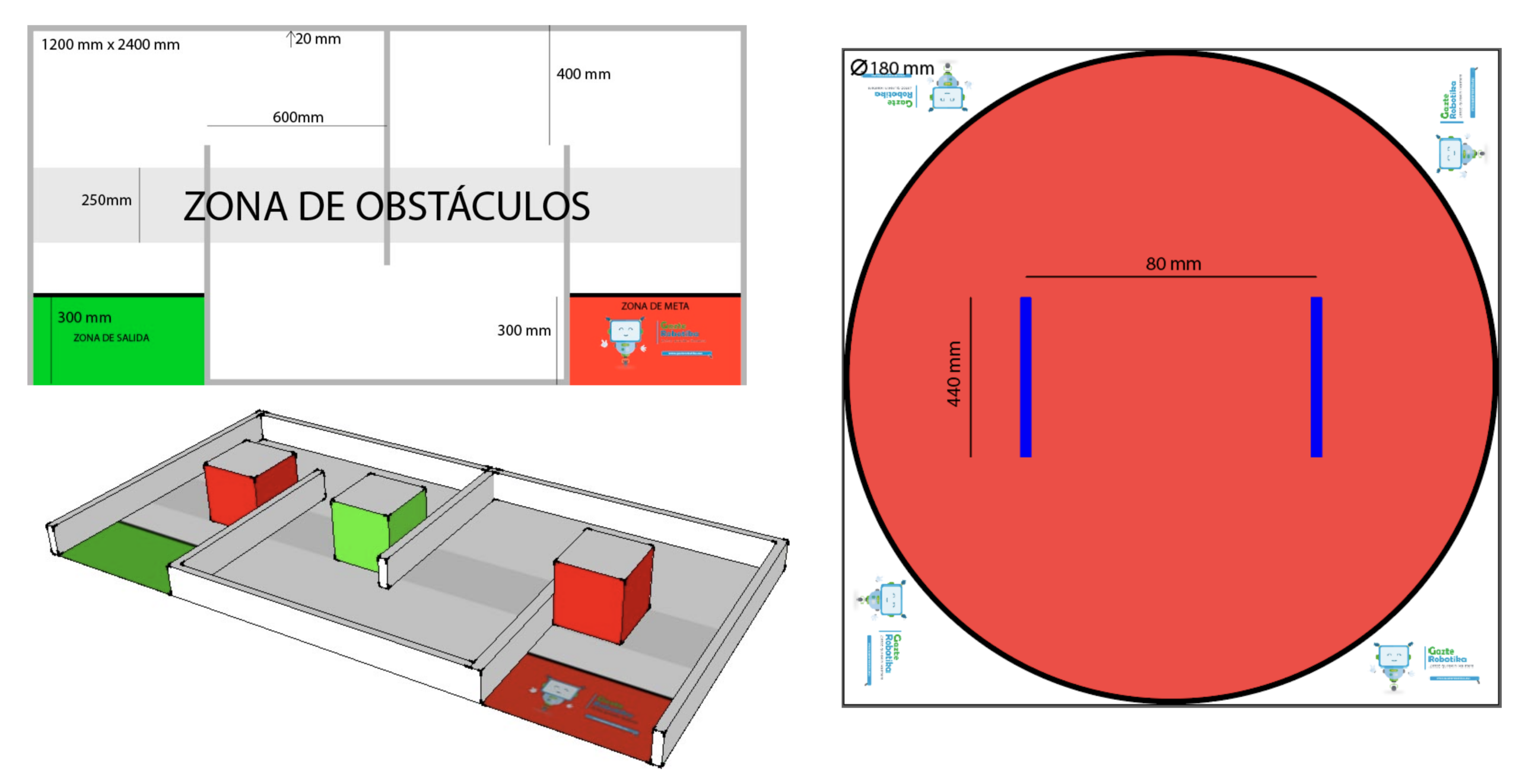
MISIÓN 4: Construcción robot de SUMO. Conceptos básicos.
MISIÓN 5: Estrategias de LUCHA. Diseño y Programación.
-
Diseño y construcción de máquina o vehículo que se desplace rápido. Relación de Engranajes. Partiendo del reposo es fundamental el análisis de fuerzas para el arranque y conseguir aceleración suficiente
-
En la carrera de obstáculos, la primera clave es desplazarse recto. Para ello es esencial un correcto diseño de avance y detección de obstáculos con ultrasonidos mediante programación
-
En carrera obstáculos, la segunda clave son giros precisos de 90 grados. Haciendo uso del sensor giróscopo mediante una correcta programación con continuas validaciones en detrimento de velocidad.
-
Reto de SUMO. ¿Como son los luchadores japoneses? Debemos diseñar un vehículo que empuje, esquive, indestructible, ágil, pesado… Todo no puede ser. Debemos definir nuestra estrategia.
-
El manejo del robot mediante mando a distancia es fundamental. Existen diversas formas de programación mando y baliza sensor de infrarrojos. Selección de alternativa y mejora de la misma.
OLIMPIADA 2
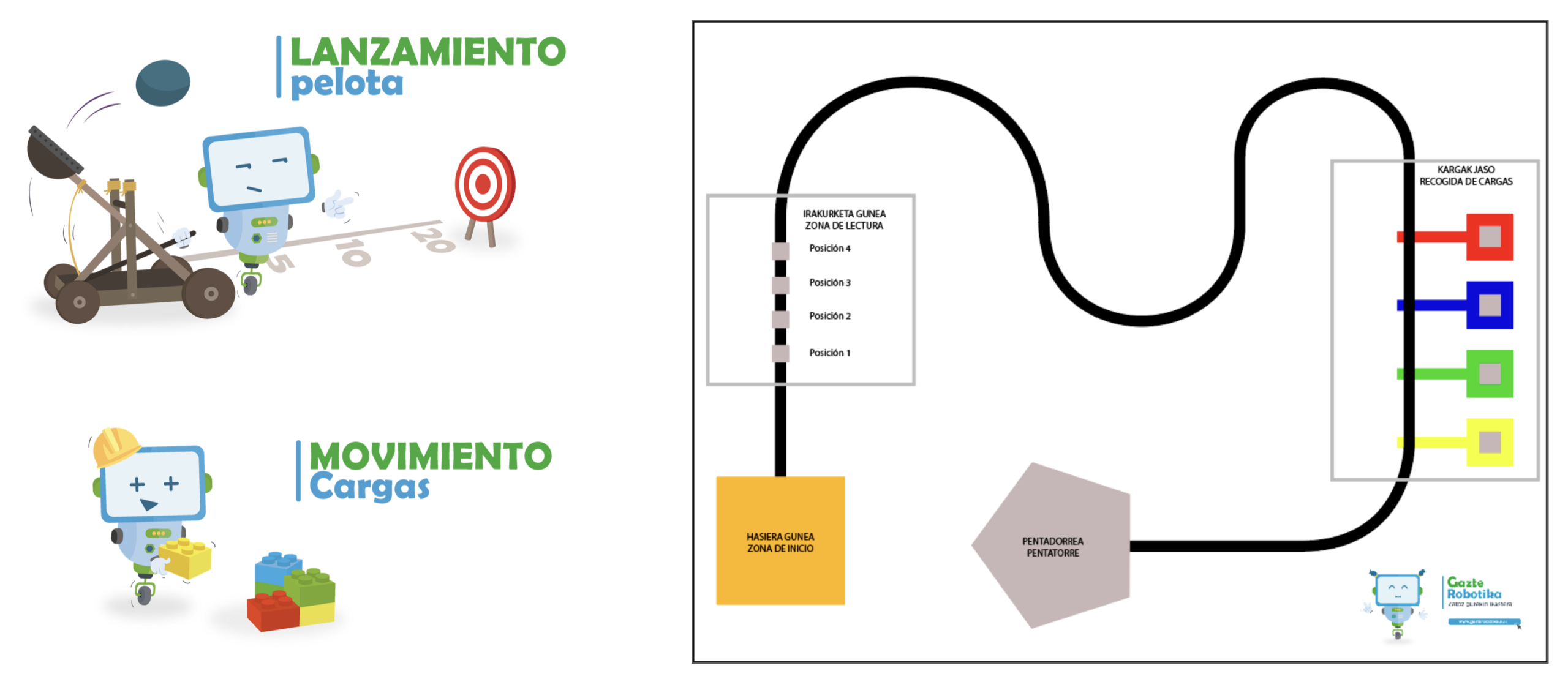
MISIÓN 1: Diseño de CATAPULTA. Alcance y Precisión.
MISIÓN 2: Construcción CATAPULTA. Proceso Mejora Continua.
MISIÓN 3: Diseño ROBOT CARGADOR. Comprensión del reto.
MISIÓN 4: Construcción del robot. MANIPULACIÓN DE CARGAS.
MISIÓN 5: PROGRAMACIÓN AVANZADA para cumplir misión.
-
Construcción máquina catapulta con alcance máximo. ¿Como conseguir impulso o impacto? Estudio de mecanismos que permitan almacenar o traspasar energía y convertirla en otra forma cuando se requiera.
-
Como segundo paso trabajamos la precisión. Debemos limitar alcance de la catapulta con facilidad sin afectar esencialmente al alcance. Estabilidad y fiabilidad de sujeciones y soportes.
-
Los colores que aparezcan en las 4 cuadrículas grises nos indican el orden en que debemos apilar la torre en el pentágono. Cada bloque que debemos recoger estará ubicado en la zona indicada previo al destino de pentatorre.
-
Diseño y Construcción de una carretilla que recoja y almacene bloque de colores y permita disponerlos a distintas alturas. Proceso de Ingeniería y Mejora Continua de cinemática de máquinas.
-
Programación de sensores que faciliten información fiable con validaciones periódicas que permitan desarrollar con éxito la misión. Bucles, interacciones y Control de Motores.
Con objeto de hacer el taller más variado y dinámico, cada jornada hacemos una breve introducción a otros productos y plataformas como pueden ser. Robótica, Halocode, Realidad Aumentada y GAFAS REALIDAD VIRTUAL, Ozobot, CyberPI, Drones, Electrónica Micro:bit, Makecode Arcade, KNEX Education, Vex, Fischertechnik, Tinkercad, Blender, Roblox o Minecraft.












