- Micro:bit es una computadora en miniatura. A pesar de su tamaño, es potente y permite realizar tareas múltiples: puede convertirse en reproductor multimedia pero también crear robots y dispositivos inteligentes para las casas.
- Podemos crear programas que corran únicamente en la tarjeta, pequeños videojuegos y aplicaciones, o conectarlo a cualquiera de los múltiples gadgets y montajes varios que se han creado alrededor del ecosistema microbit.
-
Makecode es un aplicación web de programación por bloques al estilo de scratch que nos permite iniciarnos en el mundo de la programación de una manera fácil y sencilla. Como en el resto de programas de este tipo, podemos utilizar bucles, condicionales, variables, funciones, etc..
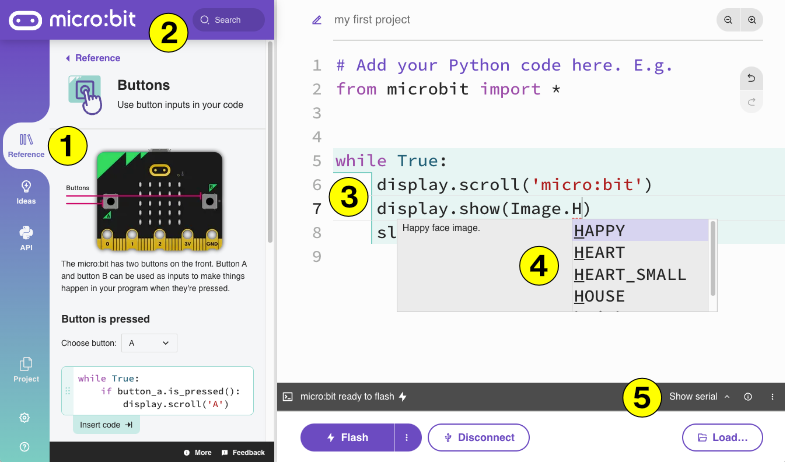
MICRO:BIT con Python. Próximamente.
Simulador de la placa Microbit con sus componentes electrónicos y circuitos y programación por bloques.
- Descripción
- Currículum
- FAQ
- Reseñas
La Placa Micro:bit es un circuito integrado electrónico:
- 25 LEDs programables individualmente.
- 3 botones programables.
- Altavoz.
- Micrófono.
- Pines de entrada y salida.
- Sensor de Luz y Temperatura.
- Sensores de movimiento (acelerómetro y brújula)
- Comunicación inalámbrica, vía Radio y Bluetooth.

-
1
 Simulador TINKERCAD para Microbit
Simulador TINKERCAD para MicrobitAcceso a la plataforma Tinkercad. Herramienta de circuitos. Tipos de componentes (básicos, Arduino, micro:bit, ensamblaje y todos). Placa Micro:bit. Comparación de códigos Makecode Editor y Tinkercad. Ejemplos del simulador de Micro:bit (Agitar, botones y mensajes). Circuito eléctrico sencillo, encender y apagar un LED. Conexiones. Polos positivo, negativo y tierra. Encendido y apagado mediante pulsador. Envío de señales por pines. Resistencia.
-
2
Componentes electrónicos básicos
Revisión de distintos componentes electrónicos reales. Placa MICRO:bit, Cable, Batería, LEDs ( 2 patas: ánodo y cátodo), Protoboard, Cables (normales y cocodrilo), Resistencias (bandas de colores), sensor PIR de movimiento con 3 patas (señal, potencia y tierra) que detecta radiación infrarroja de personas o animales, y Microservomotor que controla el ángulo de giro ( 3 patas: control, voltaje y tierra).
-
3
Control de un conjunto de LEDs
Componentes necesarios: placa Microbit, Protoboard, Leds, Cables y Resistencias. Diseño de Circuito Cerrado con Tinkercad. Circuito en real. Programación de un solo LED. Encendido durante determinado periodo de tiempo y control con pulsador. Programación de LEDs en Serie. Diseño, control y programación de varios LEDs de modo independiente y con pulsadores.
-
4
Simulación de Sensor PIR y Servomotor
Placa micro:bit, protoboard y sensor PIR. Conexiones con pines de señal, potencia y tierra del sensor. El sensor PIR emite señal digital (1 o 0) dependiendo de que detecte o no radiaciones infrarrojas o calor corporal. Programamos para que información detectada aparezca en pantalla de Micro:bit. Simulación. Ejercicio en real previa descarga del código. Al acercar la mano la señal es 1 y al retirarla vuelve a ser 0. Introducimos servomotor (señal, potencia y tierra) y programamos para que gire un determinado ángulo y posteriormente vuelva a su posición inicial al pulsar botones A y B de la Micro:bit.
-
5
Detector de Movimiento
Sensor PIR de radiación infrarroja y led a modo de aviso al detectar movimiento. Placa Micro:bit, Protoboard, Sensor, Led, Cables y Cocodrilos. Cableado de señal, potencia y tierra del sensor PIR. Conexiones del Led. Ánodo (pata larga y positivo) y Cátodo (pata corta y negativo). Programación del detector de presencia. Iniciar simulación. Al mover el punto objetivo el led se enciende. Añadir información en leds de placa Micro:bit. Circuito REAL.
-
6
Barrera Parking Automática
Micro:bit de control de servomotor de barrera del parking y otra como mando a distancia. Servomotor con señales de control, potencia y tierra. Sistema de regulación de giro del servomotor. Conexión por radio entre las dos placas. Establecimiento del canal de comunicación o grupo de radio. La posición de la barrera se establece comprobando la señal que recibimos del mando mediante una condición y un comparador. Se utiliza para ello una variable. Simulación del conjunto. Montaje en el laboratorio.
¿Por qué MICRO:BIT?
BBC micro: bit es una pequeña tarjeta programable de 4x5 cm diseñada para que aprender a programar sea fácil, divertido y al alcance de todos. Gracias a la gran cantidad de sensores que incorpora, sólo con la tarjeta se pueden llevar a cabo centenares de proyectos. Es también una plataforma IoT (Internet of Things), lo que la hace muy interesante para usuarios avanzados. Y es Open Source, por supuesto. Tanto el hardware como el software de “micro:bit” es de código abierto.
¿Cuáles son los entornos de Programación?
Tiene un entorno de programación gráfico propio: MakeCode de Microsoft, un sencillo editor gráfico online muy potente y gratuito que posibilita introducirnos en el mundo de la programación de forma intuitiva a través del lenguaje de programación visual o de bloques. Con él aprendemos a pensar como un programador sin caer en los molestos errores de sintaxis. MakeCode es, sin duda, una herramienta a tener muy en cuenta por nuestros profesores. BBC micro: bit también se puede programar con JavaScript, Python y Scratch (añadiendo una extensión).
¿Recursos disponibles?
El precio de la placa Micro:bit comienza en tan solo 19 euros y con ella ya se pueden realizar cientos de proyectos. Existen innumerables kits de sensores, actuadores, dispositivos y recursos varios (relacionados con la electrónica, las comunicaciones, la Inteligencia Artificial,... ) a precios muy asequibles.
Por favor, inicia sesión para dejar una reseña
Detalles del curso
Duración
12 horas
Conferencias
6
Vídeo
1h 39min
Nivel
13 - 14 años. Avanzado.