Descripción
MISIÓN 1: Diseño de VELOCISTA. Relación de Engranajes
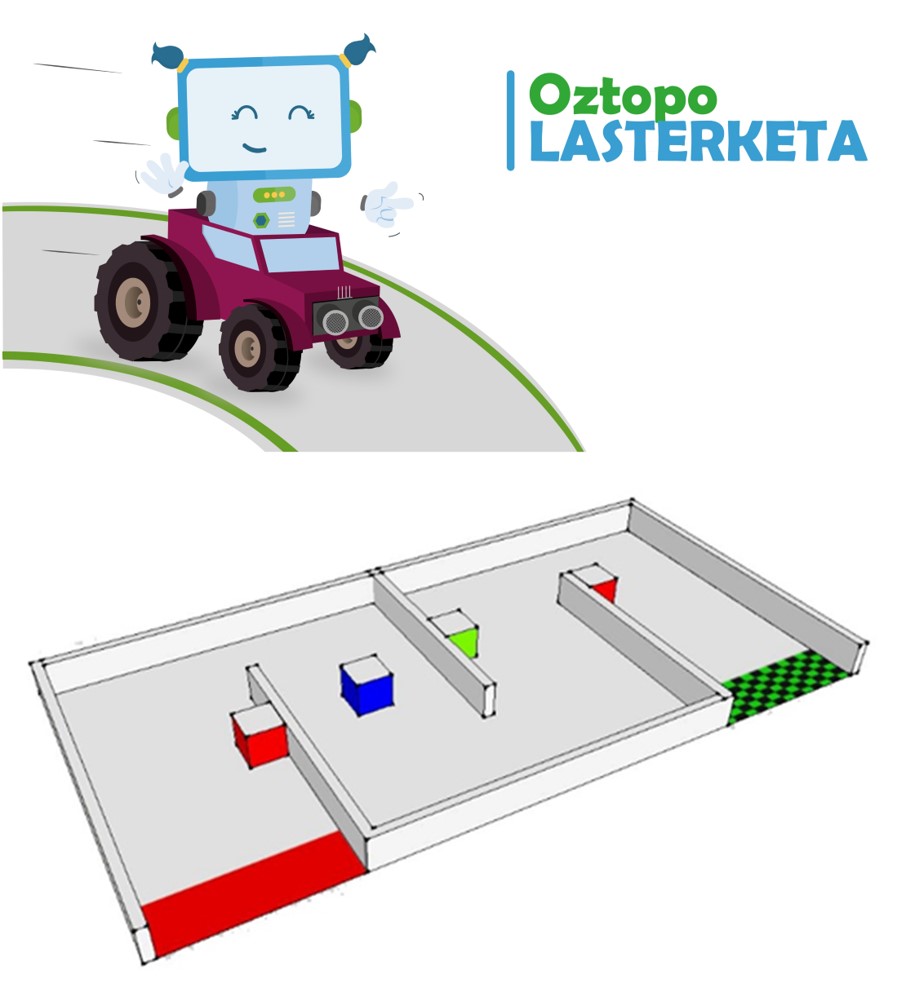
MISIÓN 2: Detección de OBSTÁCULOS y evitarlos.
MISIÓN 3: Precisión MOVIMIENTOS con Programación Avanzada
MISIÓN 4: Construcción robot de SUMO. Conceptos básicos.
MISIÓN 5: Estrategias de LUCHA. Diseño y Programación.
-
Diseño y construcción de máquina o vehículo que se desplace rápido. Relación de Engranajes. Partiendo del reposo es fundamental el análisis de fuerzas para el arranque y conseguir aceleración suficiente
-
En la carrera de obstáculos, la primera clave es desplazarse recto. Para ello es esencial un correcto diseño de avance y detección de obstáculos con ultrasonidos mediante programación
-
En carrera obstáculos, la segunda clave son giros precisos de 90 grados. Haciendo uso del sensor giróscopo mediante una correcta programación con continuas validaciones en detrimento de velocidad.
-
Reto de SUMO. ¿Como son los luchadores japoneses? Debemos diseñar un vehículo que empuje, esquive, indestructible, ágil, pesado… Todo no puede ser. Debemos definir nuestra estrategia.
-
El manejo del robot mediante mando a distancia es fundamental. Existen diversas formas de programación mando y baliza sensor de infrarrojos. Selección de alternativa y mejora de la misma.